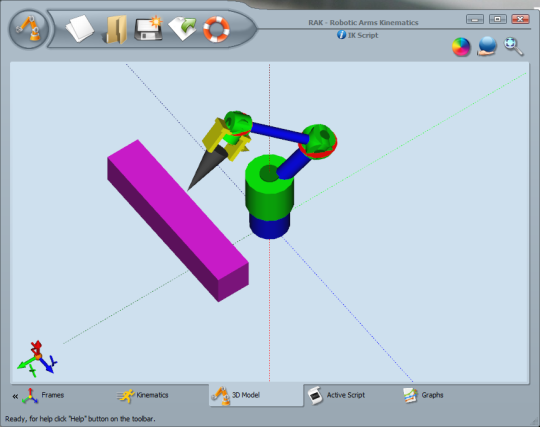
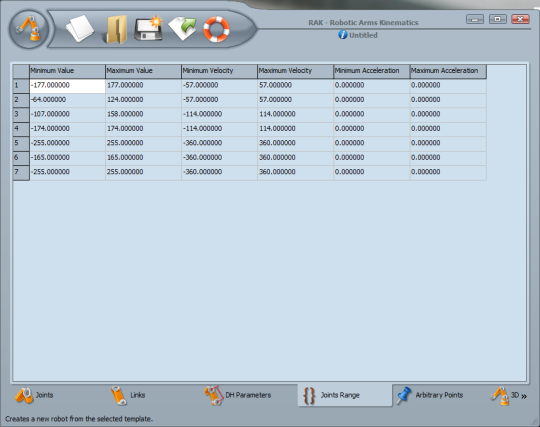
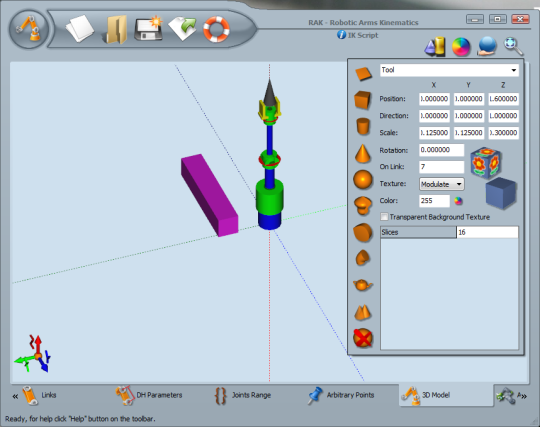
RAK는 로봇 팔을 모델링 및 운동학을 산출하기위한 프로그램이다.
이 프로그램은 개방 루프, 단일 사슬 로봇을 시뮬레이션 할 수 있습니다.
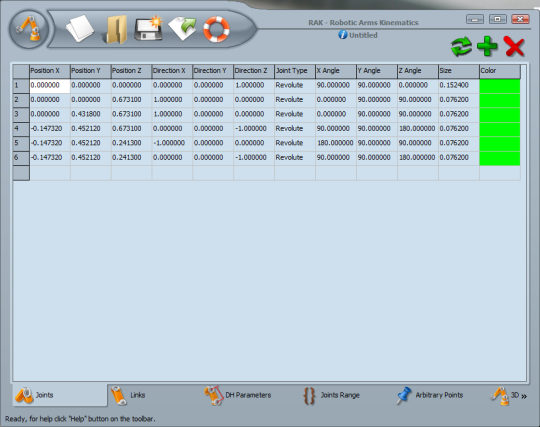
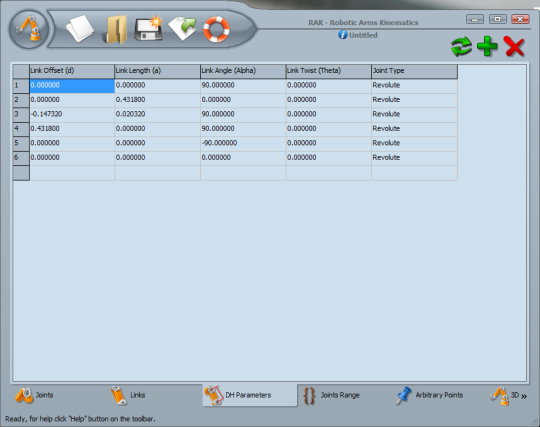
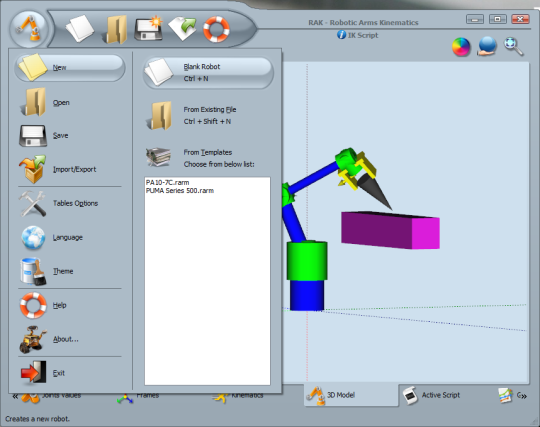
당신은 관절의 위치 또는 Denavit-Hartenberg (DH) 매개 변수에 의해 로봇을 모델링 할 수 있습니다.
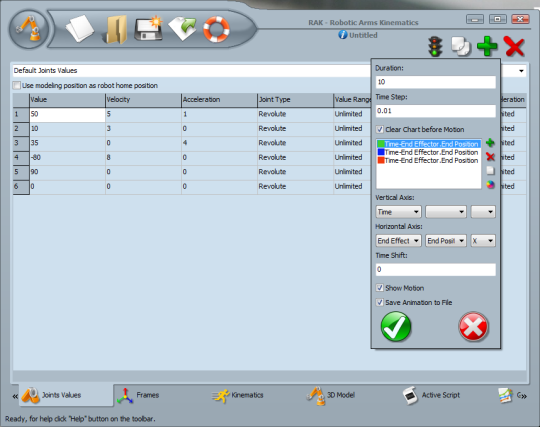
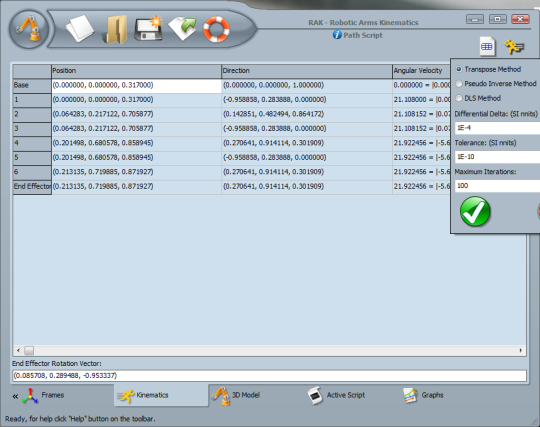
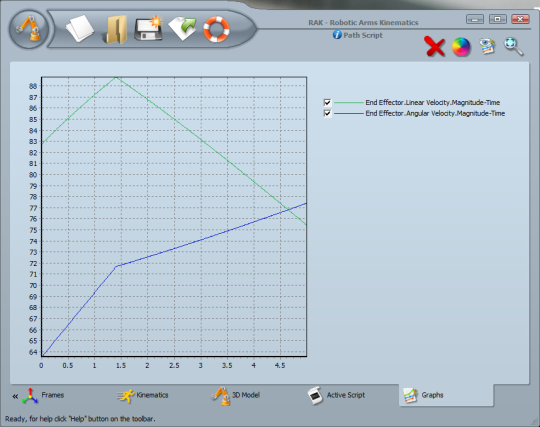
이 프로그램에 의해 로봇의 기구학과 역 기구학을 계산할 수 있습니다.
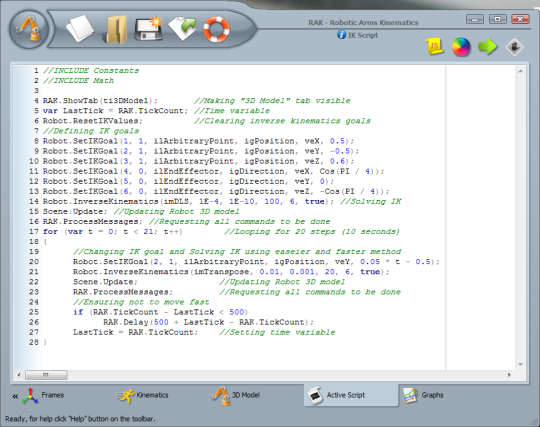
프로그램을 작성하고 실제 로봇을 제어하는 프로그램 영역도있다.
RAK
스크린 샷
지원되는 운영 시스템
개발자의 기타 소프트웨어 Dihav
PGH Calendar
24 Aug 17
Easy PNG to Icon Converter
31 Dec 14
Serial Port Terminal
24 Aug 17

APK Installer and Launcher
22 Jan 15
코멘트 RAK
최근에 본 소프트웨어를
인기있는 소프트웨어

Elastix 2 Oct 16

Vyatta 18 Feb 15

Damn Small Linux 17 Feb 15

Xfburn 17 Feb 15

Cub Linux 11 Apr 16

Linux Lite 20 Jan 18

Porteus MATE 12 Jan 17
댓글을 찾을 수 없습니다